 Radio La Cueva Am 1580 – 25 de mayo Misiones
Radio La Cueva Am 1580 – 25 de mayo Misiones

Global Positioning System, originalmente Navstar GPS, es un sistema que permite localizar cualquier objeto (una persona, un vehículo, etc) sobre la Tierra.
Tiene una precisión de hasta centímetros (si se utiliza GPS diferencial), aunque lo común son unos pocos metros.
El sistema fue desarrollado, instalado y empleado por el Departamento de Defensa de Estados Unidos, y actualmente es propiedad de la Fuerza Espacial de los Estados Unidos. Para determinar su posición, un usuario utiliza cuatro o más satélites y utiliza la trilateración (método matemático para determinar las posiciones relativas de objetos usando la geometría de triángulos de forma análoga a la triangulación).
Cuando se desea determinar la posición tridimensional, el receptor que se utiliza para ello localiza automáticamente como mínimo cuatro satélites de la red, de los que recibe unas señales indicando la identificación y hora del reloj de cada uno de ellos, además de información sobre la constelación de satélites que forman parte del sistema. Con base en estas señales, el aparato sincroniza su propio reloj con el tiempo del sistema GPS y calcula el tiempo que tardan en llegar las señales al equipo, y de tal modo mide la distancia al satélite. Mediante el método de trilateración inversa, computa su propia posición. Se calcula también con una gran exactitud en el tiempo, basado en los relojes atómicos a bordo cada uno de los satélites y en el segmento terreno de GPS.
Actualmente GPS consta de 31 satélites operativos.
En la década de 1960, el sistema de navegación terrestre OMEGA, basado en la comparación de fase de las señales emitidas a partir de pares de estaciones terrestres, se convirtió en el primer sistema mundial de radio de navegación. Las limitaciones de estos sistemas impulsaron la necesidad de una solución de navegación más universal con más precisión.
La armada estadounidense aplicó esta tecnología de navegación utilizando satélites para proveer a los sistemas de navegación de sus flotas observaciones de posiciones actualizadas y precisas. El sistema debía cumplir los requisitos de globalidad, abarcando toda la superficie del globo; continuidad, funcionamiento continuo sin afectarle las condiciones atmosféricas; altamente dinámico, para posibilitar su uso en aviación y precisión. Esto llevó a producir diferentes experimentos como el Timation y el sistema 621B en desiertos simulando diferentes comportamientos.
Así surgió el sistema TRANSIT, que quedó operativo en 1964, y hacia 1967 estuvo disponible, además, para uso comercial militar. TRANSIT estaba constituido por una constelación de seis satélites en órbita polar baja, a una altitud de 1074 km. Tal configuración conseguía una cobertura mundial, pero no obstante, la posibilidad de posicionarse era intermitente, pudiendo acceder a los satélites cada 1,5 horas. El cálculo de la posición requería estar siguiendo al satélite durante quince minutos continuamente.
En 1967, la U.S. Navy desarrolló el satélite Timation, que demostró la viabilidad de colocar relojes precisos al espacio, una tecnología requerida por el GPS.
Posteriormente, en esa misma década y gracias al desarrollo de los relojes atómicos, se diseñó una constelación de satélites, portando cada uno de ellos uno de estos relojes y estando todos sincronizados con base en una referencia de tiempo determinado.
En 1973 se combinaron los programas de la Armada y de la Fuerza Aérea de los Estados Unidos (este último consistente en una técnica de transmisión codificada que proveía datos precisos usando una señal modulada con un código de PRN (Pseudo-Random Noise: ruido pseudoaleatorio), en lo que se conoció como Navigation Technology Program (programa de tecnología de navegación), posteriormente renombrado NAVSTAR GPS.
Entre 1978 y 1985 se desarrollaron y lanzaron once satélites prototipo experimentales NAVSTAR, a los que siguieron otras generaciones de satélites, hasta completar la constelación actual, a la que se declaró con capacidad operativa inicial en diciembre de 1993 y con capacidad operativa plena y utilidad civil en abril de 1995.
Debido al desafortunado derribo del Vuelo 007 de Korean Air por la Unión Soviética en 1983, con 269 víctimas mortales, el presidente estadounidense Ronald Reagan anunció que el sistema GPS estaría disponible para propósitos civiles una vez quedara finalizado, aunque el servicio se ofrecería con una precisión menor que la disponible para servicios militares.
En 1996, reconociendo la importancia del uso civil del GPS, el presidente Bill Clinton impulsó una directiva declarando el uso dual (militar y civil) del GPS.
En 2009, el gobierno de los Estados Unidos ofreció el servicio normalizado de determinación de la posición para apoyar las necesidades de la OACI (Organización de Aviación Civil Internacional), y esta aceptó el ofrecimiento.
Competidores del GPS
La antigua Unión Soviética construyó un sistema similar llamado GLONASS, ahora gestionado por la Federación Rusa.
La Unión Europea desarrolló el sistema de navegación Galileo. En diciembre de 2016 la Comisión Europea, propietaria del sistema, informó que el sistema de navegación Galileo comenzó sus operaciones y que los satélites ya envían información de posicionamiento, navegación y determinación de la hora a usuarios de todo el mundo.
La República Popular China está implementando su propio sistema de navegación, el denominado Beidou, que está previsto que cuente con de 12 a 14 satélites entre 2011 y 2015. Para 2020, ya plenamente operativo deberá contar con 30 satélites. En diciembre de 2014 tenían 14 satélites en órbita.
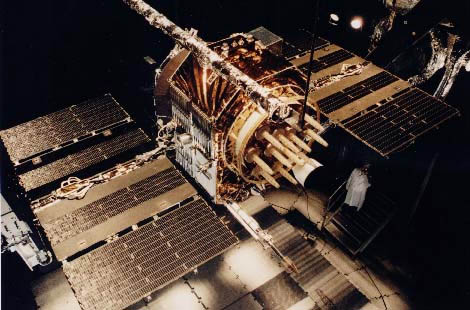
Características técnicas y prestaciones

Foto: Wikipedia – Dominio Público
El Sistema Global de Navegación por Satélite lo componen:
- Satélites en la constelación: 24 (4 × 6 órbitas)
* Altitud: 20.200 km
* Período: 11 h 58 min (12 horas sidéreas)*
* Inclinación: 55 grados (respecto al ecuador
terrestre).
* Vida útil: 7,5 años
* Hora: 1 ns (nanosegundo) - Cobertura: mundial
- Capacidad de usuarios: ilimitada
- Sistema de coordenadas: 8000
* El tiempo sidéreo, también denominado tiempo sideral, es el tiempo medido por el movimiento diurno aparente del equinoccio vernal (fig. 1), que se aproxima, aunque sin ser idéntico, al movimiento de las estrellas. Se diferencia en la precesión del equinoccio vernal con respecto a las estrellas.
Señal GPS
Cada satélite GPS emite continuamente un mensaje de navegación a 50 bits por segundo en la frecuencia transportadora de microondas de aproximadamente 1600 MHz. La radio FM, en comparación, se emite a entre 87,5 y 108,0 MHz y las redes Wi-Fi funcionan a alrededor de 5000 MHz y 2400 MHz. Más concretamente, todos los satélites emiten a 1575,42 MHz (esta es la señal L1) y 1227,6 MHz (la señal L2).
La señal GPS proporciona la “hora de la semana” precisa de acuerdo con el reloj atómico a bordo del satélite, el número de semana GPS y un informe de estado para el satélite de manera que puede deducirse si es defectuoso. Cada transmisión dura 30 segundos y lleva 1500 bits de datos codificados. Esta pequeña cantidad de datos está codificada con una secuencia pseudoaleatoria (PRN) de alta velocidad que es diferente para cada satélite. Los receptores GPS conocen los códigos PRN de cada satélite y por ello no solo pueden decodificar la señal, sino que la pueden distinguir entre diferentes satélites.

Foto: Wikipedia – Dominio Público
Las transmisiones son cronometradas para empezar de forma precisa en el minuto y en el medio minuto tal como indique el reloj atómico del satélite. La primera parte de la señal GPS indica al receptor la relación entre el reloj del satélite y la hora GPS. La siguiente serie de datos proporciona al receptor información de órbita precisa del satélite.
Evolución del sistema GPS
- Incorporación de una nueva señal en L1 para uso civil.
- Adición de una tercera señal civil (L5): 1176,45 MHz
- Protección y disponibilidad de una de las dos nuevas señales para servicios de Seguridad para la Vida (SOL).
- Mejora en la estructura de señales.
- Incremento en la potencia de señal (L5 tendrá un nivel de potencia de –154 dB).
- Mejora en la precisión (1-5 m).
- Aumento en el número de estaciones de monitorización: 12 (el doble)
- Permitir mejor interoperabilidad con la frecuencia L1 de Galileo
El programa GPS III persigue el objetivo de garantizar que el GPS satisfaga requisitos militares y civiles previstos para los próximos 30 años. Este programa se está desarrollando para utilizar un enfoque en tres etapas (una de las etapas de transición es el GPS II); muy flexible, permite cambios futuros y reduce riesgos. El desarrollo de satélites GPS II comenzó en 2005, y el primero de ellos está disponible desde 2012, con el objetivo de lograr la transición completa de GPS III en 2017. Los desafíos son los siguientes:
- Representar los requisitos de usuarios, tanto civiles como militares, en cuanto a GPS.
- Limitar los requisitos GPS III dentro de los objetivos operacionales.
- Proporcionar flexibilidad que permita cambios futuros para satisfacer requisitos de los usuarios hasta 2030.
- Proporcionar solidez para la creciente dependencia en la determinación de posición y de hora precisa como servicio internacional.
El sistema ha evolucionado y de él han derivado nuevos sistemas de posicionamiento, como sistemas de posicionamiento dinámicos, un sistema de captura de datos, que permite al usuario realizar mediciones en tiempo real y en movimiento, el llamado Mobile Mapping. Este sistema obtiene cartografía móvil 3D basándose en un aparato que recoge un escáner láser, cámaras métricas, un sensor inercial (IMU), sistema GNSS y un odómetro a bordo de un vehículo. Se consiguen grandes precisiones, gracias a las tres tecnologías de posicionamiento: IMU + GNSS + odómetro, que trabajando a la vez dan la opción de medir incluso en zonas donde la señal de satélite no es buena.

Funcionamiento
La información que es útil al receptor GPS para determinar su posición se llama efemérides. En este caso cada satélite emite sus propias efemérides, en la que se incluye la salud del satélite, su posición en el espacio, su hora atómica, información doppler, etc.
Mediante la trilateración se determina la posición del receptor:
* Cada satélite indica que el receptor se encuentra en un punto en la superficie de la esfera, con centro en el propio satélite y de radio la distancia total hasta el receptor.
* Obteniendo información de dos satélites queda determinada una circunferencia que resulta cuando se intersecan las dos esferas en algún punto de la cual se encuentra el receptor.
* Teniendo información de un tercer satélite, se elimina el inconveniente de la falta de sincronización entre los relojes de los receptores GPS y los relojes de los satélites. Y es en este momento cuando el receptor GPS puede determinar una posición 3D exacta (latitud, longitud y altitud).
Los dispositivos GPS son incorporados a la telemática (servicio de telecomunicaciones que permite la transmisión de datos informatizados a través del teléfono) para proporcionar una experiencia óptima a los usuarios de vehículos de flotas. Con esta incorporación se permite tener una visión completa de su funcionamiento y así poder optimizar procesos.
Fiabilidad de los datos
Debido al carácter militar del sistema GPS, en el Departamento de Defensa de los EE. UU. se reservaba la posibilidad de incluir un cierto grado de error aleatorio, que podía variar de los 15 a los 100 metros. La llamada disponibilidad selectiva (S/A) fue eliminada el 2 de mayo de 2000. Aunque actualmente no aplique tal error inducido, la precisión intrínseca del sistema GPS depende del número de satélites visibles en un momento y posición determinados.
Si se capta la señal de entre siete y nueve satélites, y si éstos están en una geometría adecuada (están dispersos), pueden obtenerse precisiones inferiores a 2,5 metros en el 95 % del tiempo. Si se activa el sistema DGPS llamado SBAS (WAAS-EGNOS-MSAS), la precisión mejora, siendo inferior a un metro en el 97 % de los casos.
Fuentes de error
La posición calculada por un receptor GPS requiere en el instante actual la posición del satélite y el retraso medido de la señal recibida. La precisión es dependiente de la posición y el retraso de la señal.
Al introducir el retraso, el receptor compara una serie de bits (unidad binaria) recibida del satélite con una versión interna mediante (un motor de correlación cableado en un chip especializado, basado en la patente Gronemeyer’216).Cuando se comparan los límites de la serie, las electrónicas pueden fijar la diferencia a 1 % de un tiempo BIT, o aproximadamente 10 nanosegundos por el código C/A. Desde entonces las señales GPS se propagan a la velocidad de luz, que representa un error de 3 metros. Este es el error mínimo posible usando solamente la señal GPS C/A.
La precisión de la posición se mejora con una señal P(Y). Al presumir la misma precisión de 1 % de tiempo BIT, la señal P(Y) (alta frecuencia) resulta en una precisión de más o menos 30 centímetros. Los errores en las electrónicas son una de las varias razones que perjudican la precisión (ver la tabla).
Puede también mejorarse la precisión, incluso de los receptores GPS estándares (no militares) mediante software y técnicas de tiempo real. Esto ha sido puesto a prueba sobre un sistema global de navegación satelital (GNSS) como es el NAVSTAR-GPS. La propuesta se basó en el desarrollo de un sistema de posicionamiento relativo de precisión dotado de receptores de bajo costo. La contribución se dio por el desarrollo de una metodología y técnicas para el tratamiento de información que proviene de los receptores.
| Fuente | Efecto |
| Ionosfera | ± 3 m |
| Efemérides | ± 2,5 m |
| Reloj satelital | ± 2 m |
| Distorsión multibandas | ± 1 m |
| Troposfera | ± 0,5 m |
| Errores numéricos | ± 1 m o menos |
- Retraso de la señal en la ionosfera y la troposfera.
- Señal multirruta, producida por el rebote de la señal en edificios y montañas cercanos.
- Errores de orbitales, donde los datos de la órbita del satélite no son completamente precisos.
- Número de satélites visibles.
- Geometría de los satélites visibles.
- Errores locales en el reloj del GPS.
Factores que Afectan la Calidad de los Datos:
- Errores Propios del Satélite.
- Errores provenientes del medio de propagación.
- Errores en la recepción.
FUENTE AURORA ISRAEL
